Abstract
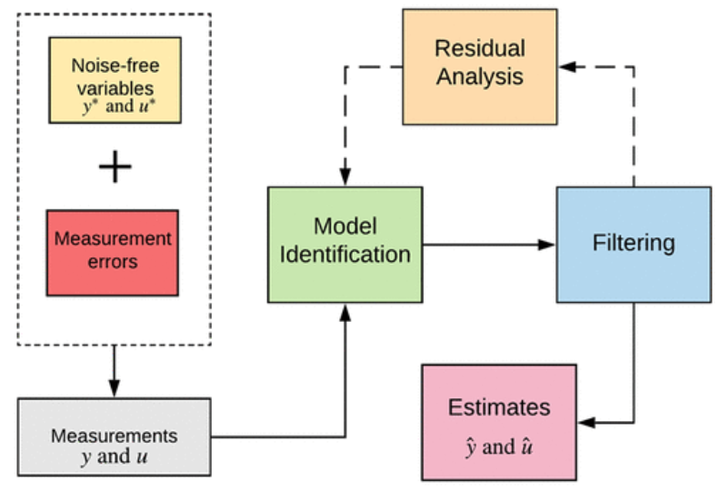
Optimal filtering and residual generation method for errors-in-variables (EIV) scenario.
Type
Publication
Industrial & Engineering Chemistry Research
Optimal filtering and residual generation method for errors-in-variables (EIV) scenario.